<TA7291モータドライバの調査>
今まで、PICとRaspberry Pi ZEROで制御する戦車の製作をしました。
このときの前進、後進、右折、左折の制御はリレーでしました。今回、モータ制御に適した
TA7291モータドライバICを入手しましたので、次回製作のための基本動作を調査しました。
TA7291モータドライバIC
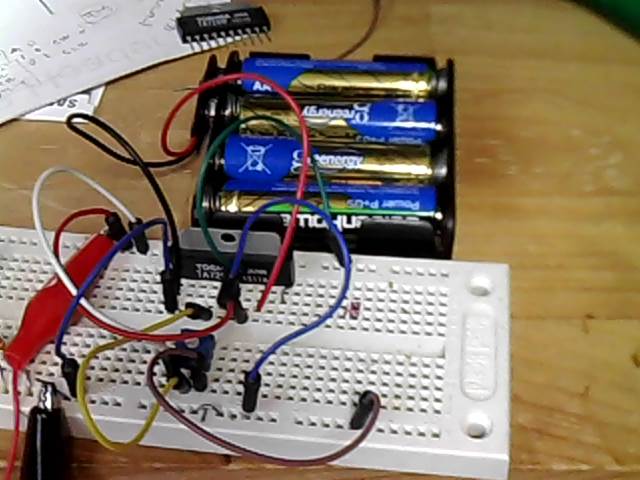
 ブレッドボードに組立てた測定回路
ブレッドボードに組立てた測定回路
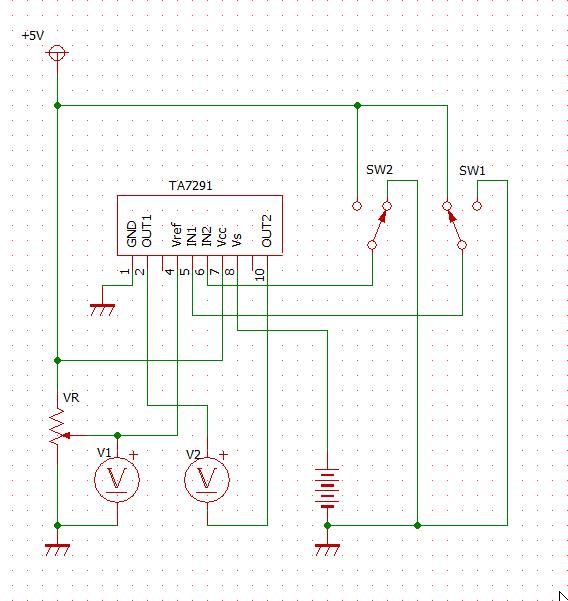
 測定回路図
測定回路図
 Vref電圧に対するOUT1-OUT2電圧の測定結果
Vcc5v
Vs6.45v(単三×4)
------------------------------------
I IN1:H IN2:L I IN1:L IN2:H
V1 I V2 I V2
(Vref) I (OUT1-OUT2) I (OUT1-OUT2)
------------------------------------
0 I +0.84 I -0.84
------------------------------------
0.5 I +1.38 I -1.38
------------------------------------
1.0 I +1.89 I -1.89
------------------------------------
1.5 I +2.38 I -2.38
------------------------------------
2.0 I +2.86 I -2.86
------------------------------------
2.5 I +3.34 I -3.34
------------------------------------
3.0 I +3.82 I -3.82
------------------------------------
3.5 I +4.29 I -4.29
------------------------------------
4.0 I +4.75 I -4.75
------------------------------------
4.5 I +5.22 I -5.22
------------------------------------
5.0 I +5.64 I -5.64
------------------------------------
OUT1-OUT2出力はモータに供給します、この出力電圧を制御するには上記測定からも分かるように
Vrefの入力電圧を可変しますが、パルス電圧をVrefに入力しても制御出来ます。そしてこのパルス巾を
可変することにより電圧(平均電圧)が可変するので可能となります。
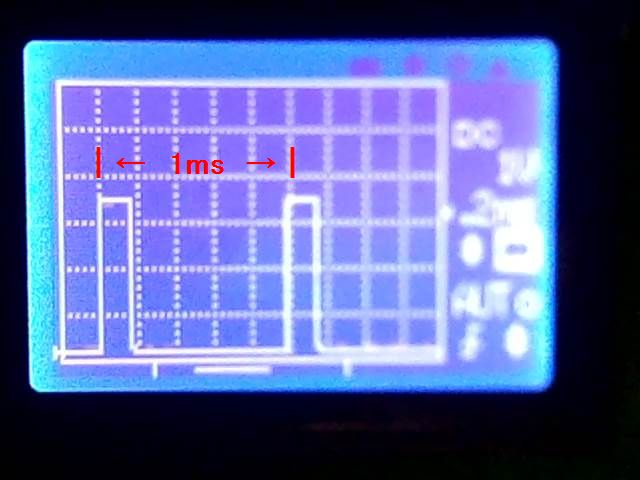
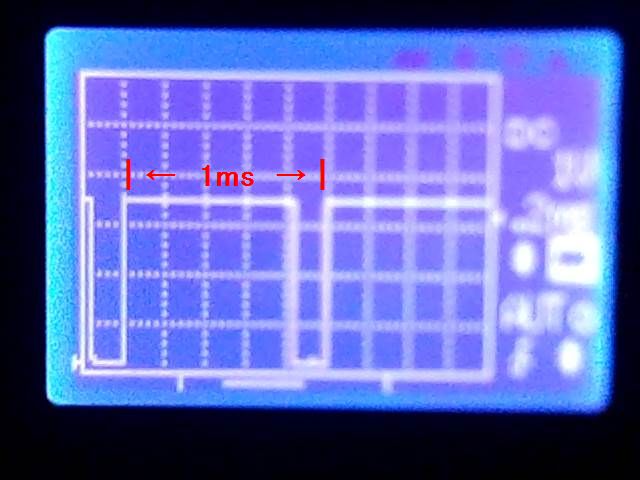
下の画像は、Raspberry Pi ZEROで作ったパルス(Pythonプログラム)をTA7291のVrefに入力したときのOUT1-OUT2の出力電圧です
入力パルスの周波数は1Khzで、パルス巾を3点変えてVrefに入力したときの出力電圧(平均電圧)です。(出力はパルス波形です)
デューティ比20%
Vref電圧に対するOUT1-OUT2電圧の測定結果
Vcc5v
Vs6.45v(単三×4)
------------------------------------
I IN1:H IN2:L I IN1:L IN2:H
V1 I V2 I V2
(Vref) I (OUT1-OUT2) I (OUT1-OUT2)
------------------------------------
0 I +0.84 I -0.84
------------------------------------
0.5 I +1.38 I -1.38
------------------------------------
1.0 I +1.89 I -1.89
------------------------------------
1.5 I +2.38 I -2.38
------------------------------------
2.0 I +2.86 I -2.86
------------------------------------
2.5 I +3.34 I -3.34
------------------------------------
3.0 I +3.82 I -3.82
------------------------------------
3.5 I +4.29 I -4.29
------------------------------------
4.0 I +4.75 I -4.75
------------------------------------
4.5 I +5.22 I -5.22
------------------------------------
5.0 I +5.64 I -5.64
------------------------------------
OUT1-OUT2出力はモータに供給します、この出力電圧を制御するには上記測定からも分かるように
Vrefの入力電圧を可変しますが、パルス電圧をVrefに入力しても制御出来ます。そしてこのパルス巾を
可変することにより電圧(平均電圧)が可変するので可能となります。
下の画像は、Raspberry Pi ZEROで作ったパルス(Pythonプログラム)をTA7291のVrefに入力したときのOUT1-OUT2の出力電圧です
入力パルスの周波数は1Khzで、パルス巾を3点変えてVrefに入力したときの出力電圧(平均電圧)です。(出力はパルス波形です)
デューティ比20%
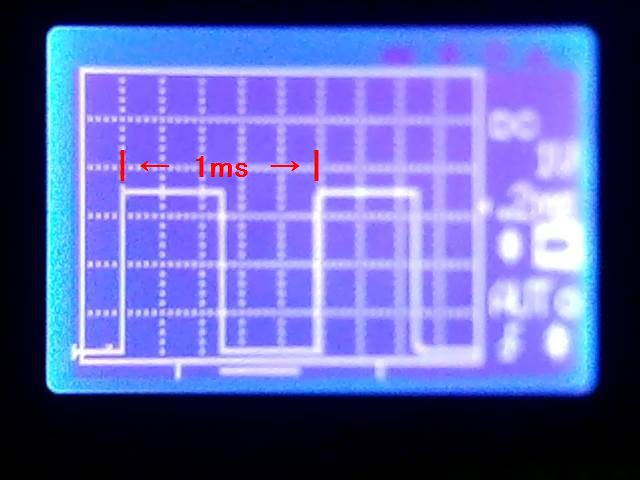
 デューティ比50%
デューティ比50%
 デューティ比80%
デューティ比80%
 以上、TA7291モータドライバICの使い方が、分かったので次は実際にモータも接続して実験したいと思います。
以上、TA7291モータドライバICの使い方が、分かったので次は実際にモータも接続して実験したいと思います。