<PIC12F629のCW送信>
8ピンの小さいPIC12F629を使って3パターンCW文字列送信回路を作りましたので紹介します。
このPICは128バイトのEEPROMを内蔵していますので、プログラムを焼く時に3パターンの
CW文字列もEEPROMに保存しますので、電源を切っても内容は消えません。
文字送信中のスピード変更が出来ます。
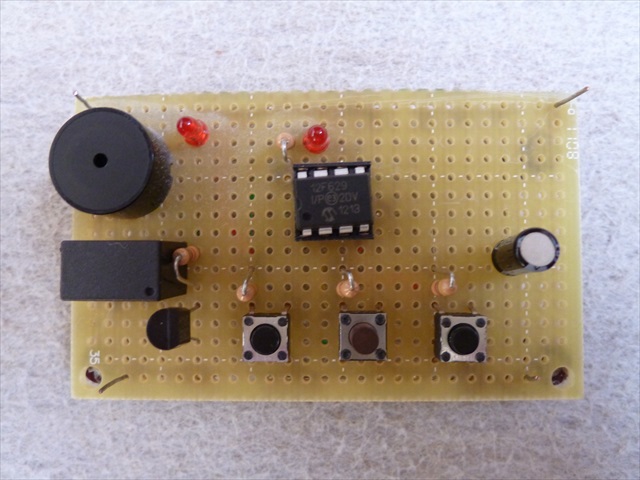
右端がスタート、真ん中がパターン切替、左端がスピード変更のスイッチ
基板に組立(クリックして見て下さい)
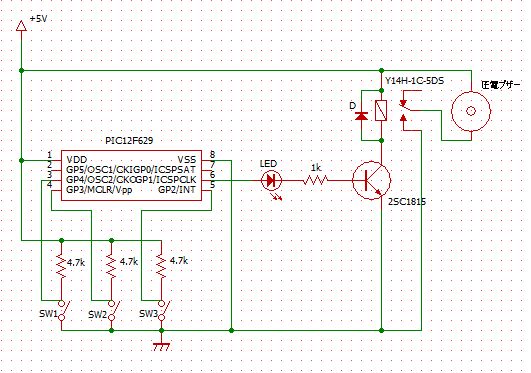
 回路図
回路図
 プログラムソース
******************************** main **********************************
////////////////////////////////////////////////////////////////////////////////////////////////
// PIC12F629 8ピン IOポートGPIO0-GPIO5の6つ //
// EEPROMに書き込んでいる3パターンの文字列を読み出して低周波発信器を鳴らす //
// パターンの選択が出来る、スピードが変えれる。 //
// GPIO1:モールス出力点滅用 GPIO2:スピード変更 GPIO3:文字送信スタート用 GPIO4:パターン切替//
////////////////////////////////////////////////////////////////////////////////////////////////
#include <htc.h>
#define JIKAN 50
//発信周波数は、INTIO設定しているので4MhzとなるのでOSCCONなどの設定はない
__CONFIG(BOREN & UNPROTECT & MCLRDIS & PWRTEN & WDTDIS & INTIO);
__IDLOC(0001);
#define _XTAL_FREQ 4000000 /*4000Khz */
//WRITE No.1(0-119)
__EEPROM_DATA('C','Q','C','Q',' ','D','E',' '); /* 0-7 00-07 */
__EEPROM_DATA('J','A','3','R','U','A',' ','P'); /* 8-15 08-0F */
__EEPROM_DATA('S','E',' ','K','%',0xFF,0xFF,0xFF); /* 16-23 10-17 */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 24-31 18-1F */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 32-39 20-27 */
__EEPROM_DATA('b','K',' ','G','A',' ','T','N'); /* 40-47 28-2F */
__EEPROM_DATA('X',' ','F','B',' ','R','P','T'); /* 48-55 30-37 */
__EEPROM_DATA(' ','U','R',' ','A','L','S','O'); /* 56-63 38-3F */
__EEPROM_DATA(' ','5','9','9',' ','b','K','%'); /* 64-71 40-47 */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 72-79 48-4F */
__EEPROM_DATA('T','N','X',' ','F','B',' ','Q'); /* 80-87 50-57 */
__EEPROM_DATA('S','O',' ','E','S',' ','H','P'); /* 88-95 58-5F */
__EEPROM_DATA('E',' ','C','U',' ','A','G','N'); /* 96-103 60-67 */
__EEPROM_DATA(' ','7','3',' ','s','K',' ','E'); /* 104-111 68-6F */
__EEPROM_DATA(' ','E','%',0xFF,0xFF,0xFF,0xFF,0xFF); /* 112-119 70-77 */
ioport();
mojisend();
j_flug1();
j_flug2();
j_flug3();
j_flug4();
char rommoji;
int r_add=0;
int flug=1;
int flug1=1;
int cnt_add=0;
int s_add=0;
int cnt_speed=1;
main()
{
INTF=0;
ioport();
while(1){
if(flug==1 && GPIO4==0)j_flug1(); /*GPIO4:パターン切替*/
if(flug==0 && GPIO4==1)j_flug2();
if(flug1==1 && GPIO3==0)j_flug3(); /*GPIO3:スタート*/
if(flug1==0 && GPIO3==1)j_flug4();
}
}
/* 関数群 */
interrupt warikomi()
{
++cnt_speed;
if(cnt_speed>20)cnt_speed=1;
INTF=0; /*INTCONレジスタ 入力エッジがあると1になるので0にしておく*/
}
ioport()
{
// ANSEL=0x00; /* デジタルI/Oモードにする 12F675はこの設定がある。*/
CMCON=0x07; /* デジタルI/Oモードにする */
GPIO=0; /* PORTを初期化する */
TRISIO=0x1c; /* GPIO2,3,4は入力GPIO0,1,5は出力*/
INTEDG=1; /*OPTIONレジスタ 1:立上がり*/
INTF=0; /*INTCONレジスタ 入力エッジがあると1になるので0にしておく*/
INTE=1; /*INTCONレジスタ 1:入力エッジ使う*/
GIE=1; /*割り込みを使う*/
}
j_flug1()
{
__delay_ms(JIKAN);
flug=0;
}
j_flug2()
{
__delay_ms(JIKAN);
flug=1;
++cnt_add;
if(cnt_add>=3) cnt_add=0; /*cnt_add>=3 3回以上押すとS_add=0にcnt_add=0にする*/
if(cnt_add==0)s_add=0;
if(cnt_add==1)s_add=40;
if(cnt_add==2)s_add=80;
}
j_flug3()
{
flug1=0;
}
j_flug4()
{
flug1=1;
//do while の記述方法 whileの所の(rommoji != '%')が成立中(%以外)は繰り返す。'%'なら抜ける
do{
rommoji=eeprom_read(s_add+r_add);
mojisend();
++r_add;
}while(rommoji != '%');
r_add=0;
}
******************************** main ここまで**********************************
******************************** mojisend**********************************
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// //
// 1つのメインプログラムで構成していたが、mojisendを別のmojisend.cとした。 //
// 従って、rom_cw3b.cとmijisend.cの2つで構成している、 mojisend.cを別のプログラムから利用させたいため分離した。//
// ポイントは、メインプログラムから文字が入ったrommoji変数をmojisend()に渡せばいい //
// //
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#include <htc.h>
#define _XTAL_FREQ 4000000 /*4000Khz */
#define JIKAN 500 /* 500ミリ秒 */
#define tan 5
#define tyo 15
#define port GPIO1 /*ioポートをここで設定する*/
//モールスの短点・長点関数
ra2_1tyo();
ra2_0tyo();
ra2_1tan();
ra2_0tan();
char rommoji; /*メインプログラムからのモールス符号変数をもらう*/
int scnt; /*短点・長点スピード用変数1*/
int speed=5; /*短点・長点スピード用変数2*/
int cnt_speed=1; /*短点・長点スピード用変数3 メインプログラムでスピードを設定、あるポートのoff/on回数*/
mojisend()
{
switch(rommoji){
case 'A':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'a':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
break;
case 'B':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'b':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'C':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'D':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'E':
ra2_1tan();
ra2_0tyo();
break;
case 'F':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'G':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'H':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'h':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'I':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'J':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'K':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'L':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'M':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'N':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'O':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'P':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'Q':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'R':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'S':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 's':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'T':
ra2_1tyo();
ra2_0tyo();
break;
case 'U':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'V':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'W':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'X':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'Y':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'Z':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '1':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '2':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '3':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '4':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '5':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '6':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '7':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '8':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '9':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '0':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case ' ':
ra2_0tyo();
ra2_0tyo();
break;
case '/':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
}
}
ra2_1tyo()
{
port=1;
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tyo);
port=0;
}
ra2_0tyo()
{
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tyo);
}
ra2_1tan()
{
port=1;
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tan);
port=0;
}
ra2_0tan()
{
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tan);
}
******************************** mojisendここまで**********************************
PIC12F629のCW送信 HEXファイル
プログラムソース
******************************** main **********************************
////////////////////////////////////////////////////////////////////////////////////////////////
// PIC12F629 8ピン IOポートGPIO0-GPIO5の6つ //
// EEPROMに書き込んでいる3パターンの文字列を読み出して低周波発信器を鳴らす //
// パターンの選択が出来る、スピードが変えれる。 //
// GPIO1:モールス出力点滅用 GPIO2:スピード変更 GPIO3:文字送信スタート用 GPIO4:パターン切替//
////////////////////////////////////////////////////////////////////////////////////////////////
#include <htc.h>
#define JIKAN 50
//発信周波数は、INTIO設定しているので4MhzとなるのでOSCCONなどの設定はない
__CONFIG(BOREN & UNPROTECT & MCLRDIS & PWRTEN & WDTDIS & INTIO);
__IDLOC(0001);
#define _XTAL_FREQ 4000000 /*4000Khz */
//WRITE No.1(0-119)
__EEPROM_DATA('C','Q','C','Q',' ','D','E',' '); /* 0-7 00-07 */
__EEPROM_DATA('J','A','3','R','U','A',' ','P'); /* 8-15 08-0F */
__EEPROM_DATA('S','E',' ','K','%',0xFF,0xFF,0xFF); /* 16-23 10-17 */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 24-31 18-1F */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 32-39 20-27 */
__EEPROM_DATA('b','K',' ','G','A',' ','T','N'); /* 40-47 28-2F */
__EEPROM_DATA('X',' ','F','B',' ','R','P','T'); /* 48-55 30-37 */
__EEPROM_DATA(' ','U','R',' ','A','L','S','O'); /* 56-63 38-3F */
__EEPROM_DATA(' ','5','9','9',' ','b','K','%'); /* 64-71 40-47 */
__EEPROM_DATA(0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF); /* 72-79 48-4F */
__EEPROM_DATA('T','N','X',' ','F','B',' ','Q'); /* 80-87 50-57 */
__EEPROM_DATA('S','O',' ','E','S',' ','H','P'); /* 88-95 58-5F */
__EEPROM_DATA('E',' ','C','U',' ','A','G','N'); /* 96-103 60-67 */
__EEPROM_DATA(' ','7','3',' ','s','K',' ','E'); /* 104-111 68-6F */
__EEPROM_DATA(' ','E','%',0xFF,0xFF,0xFF,0xFF,0xFF); /* 112-119 70-77 */
ioport();
mojisend();
j_flug1();
j_flug2();
j_flug3();
j_flug4();
char rommoji;
int r_add=0;
int flug=1;
int flug1=1;
int cnt_add=0;
int s_add=0;
int cnt_speed=1;
main()
{
INTF=0;
ioport();
while(1){
if(flug==1 && GPIO4==0)j_flug1(); /*GPIO4:パターン切替*/
if(flug==0 && GPIO4==1)j_flug2();
if(flug1==1 && GPIO3==0)j_flug3(); /*GPIO3:スタート*/
if(flug1==0 && GPIO3==1)j_flug4();
}
}
/* 関数群 */
interrupt warikomi()
{
++cnt_speed;
if(cnt_speed>20)cnt_speed=1;
INTF=0; /*INTCONレジスタ 入力エッジがあると1になるので0にしておく*/
}
ioport()
{
// ANSEL=0x00; /* デジタルI/Oモードにする 12F675はこの設定がある。*/
CMCON=0x07; /* デジタルI/Oモードにする */
GPIO=0; /* PORTを初期化する */
TRISIO=0x1c; /* GPIO2,3,4は入力GPIO0,1,5は出力*/
INTEDG=1; /*OPTIONレジスタ 1:立上がり*/
INTF=0; /*INTCONレジスタ 入力エッジがあると1になるので0にしておく*/
INTE=1; /*INTCONレジスタ 1:入力エッジ使う*/
GIE=1; /*割り込みを使う*/
}
j_flug1()
{
__delay_ms(JIKAN);
flug=0;
}
j_flug2()
{
__delay_ms(JIKAN);
flug=1;
++cnt_add;
if(cnt_add>=3) cnt_add=0; /*cnt_add>=3 3回以上押すとS_add=0にcnt_add=0にする*/
if(cnt_add==0)s_add=0;
if(cnt_add==1)s_add=40;
if(cnt_add==2)s_add=80;
}
j_flug3()
{
flug1=0;
}
j_flug4()
{
flug1=1;
//do while の記述方法 whileの所の(rommoji != '%')が成立中(%以外)は繰り返す。'%'なら抜ける
do{
rommoji=eeprom_read(s_add+r_add);
mojisend();
++r_add;
}while(rommoji != '%');
r_add=0;
}
******************************** main ここまで**********************************
******************************** mojisend**********************************
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// //
// 1つのメインプログラムで構成していたが、mojisendを別のmojisend.cとした。 //
// 従って、rom_cw3b.cとmijisend.cの2つで構成している、 mojisend.cを別のプログラムから利用させたいため分離した。//
// ポイントは、メインプログラムから文字が入ったrommoji変数をmojisend()に渡せばいい //
// //
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#include <htc.h>
#define _XTAL_FREQ 4000000 /*4000Khz */
#define JIKAN 500 /* 500ミリ秒 */
#define tan 5
#define tyo 15
#define port GPIO1 /*ioポートをここで設定する*/
//モールスの短点・長点関数
ra2_1tyo();
ra2_0tyo();
ra2_1tan();
ra2_0tan();
char rommoji; /*メインプログラムからのモールス符号変数をもらう*/
int scnt; /*短点・長点スピード用変数1*/
int speed=5; /*短点・長点スピード用変数2*/
int cnt_speed=1; /*短点・長点スピード用変数3 メインプログラムでスピードを設定、あるポートのoff/on回数*/
mojisend()
{
switch(rommoji){
case 'A':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'a':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
break;
case 'B':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'b':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'C':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'D':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'E':
ra2_1tan();
ra2_0tyo();
break;
case 'F':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'G':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'H':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'h':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'I':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'J':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'K':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'L':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'M':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'N':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'O':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'P':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'Q':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'R':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 'S':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case 's':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
break;
case 'T':
ra2_1tyo();
ra2_0tyo();
break;
case 'U':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'V':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'W':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'X':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'Y':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case 'Z':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '1':
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '2':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '3':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '4':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case '5':
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '6':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '7':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '8':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '9':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
case '0':
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tyo();
ra2_0tyo();
break;
case ' ':
ra2_0tyo();
ra2_0tyo();
break;
case '/':
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tan();
ra2_0tan();
ra2_1tyo();
ra2_0tan();
ra2_1tan();
ra2_0tyo();
break;
}
}
ra2_1tyo()
{
port=1;
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tyo);
port=0;
}
ra2_0tyo()
{
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tyo);
}
ra2_1tan()
{
port=1;
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tan);
port=0;
}
ra2_0tan()
{
for(scnt=0;scnt<speed+cnt_speed;scnt++) __delay_ms(tan);
}
******************************** mojisendここまで**********************************
PIC12F629のCW送信 HEXファイル