亙PIC偵傛傞LED僫僀僩儔僀僟乕亜
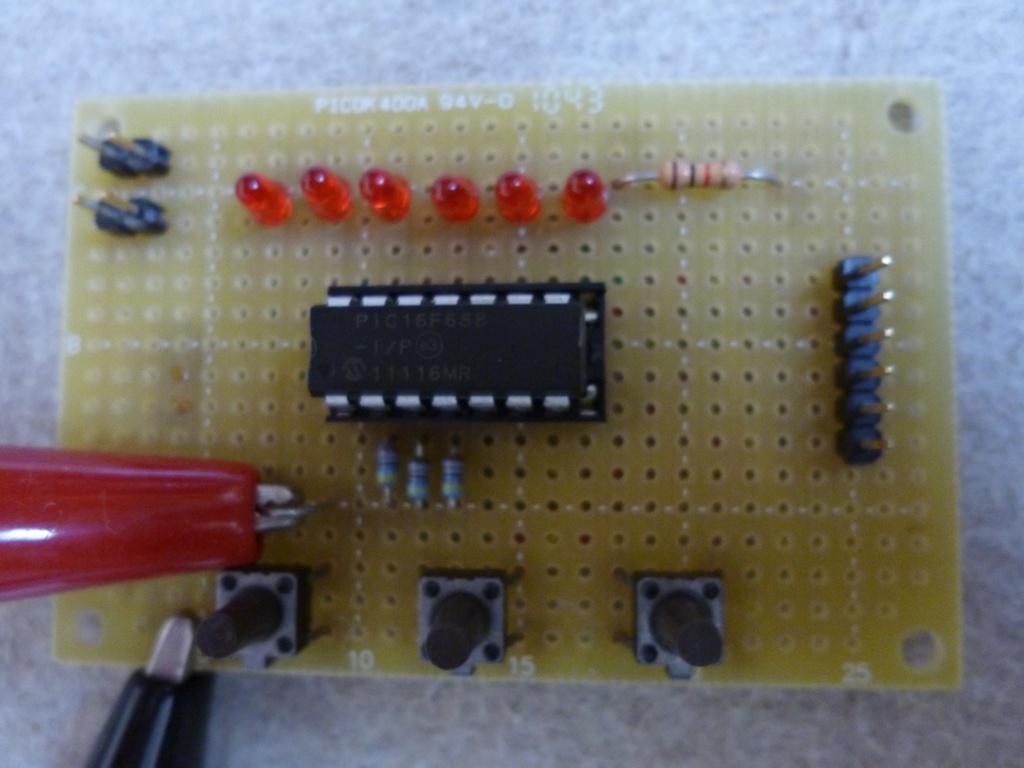
LED6屄傪弴斣偵柵偝偣傞偙偲偵傛傝丄棳傟傞傛偆偵尒偊傑偡丅
愄丄僫僀僩儔僀僟乕偲尵偆奜崙TV斣慻偑偁傝傛偔尒偰偄傑偟偨丅
斣慻偵弌偰偔傞幵偑恖岺摢擼傪搵嵹偟偰偄偰僶儞僷乕偵庢傝晅偗偰偄傞
揹媴偑棳傟傞傛偆偵揰柵偟偰偄傑偟偨丅
僾儘僌儔儉偵傛傝丄怓乆曄偊傞偙偲偑弌棃傑偡丅夋憸傪僋儕僢僋偟偰尒偰壓偝偄丅
僞僋僩僗僀僢僠偺嵟嵍偼塃偐傜嵍傊丄恀拞偼嵍偐傜塃傊丄嵟塃偼丄掆巭偟傑偡丅
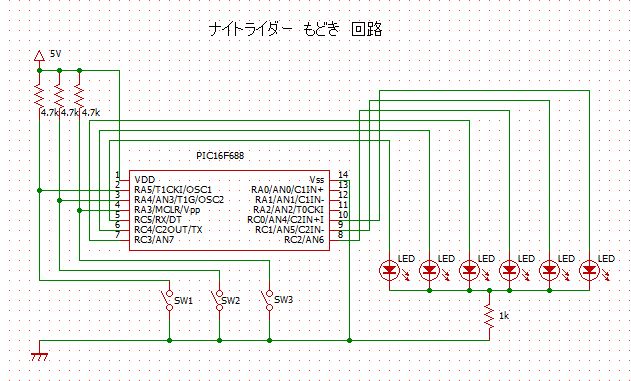
夞楬恾
 HEX僼傽僀儖
HEX僼傽僀儖
-------------------丂僾儘僌儔儉僜乕僗 -------------------
#include 亙htc.h亜
__CONFIG(FCMDIS & IESODIS & BOREN & UNPROTECT & MCLRDIS & PWRTEN & WDTDIS & INTIO);
__IDLOC(0001);
//壓婰2峴偼儁傾偱巊偆
丂丂#define _XTAL_FREQ 500000 /* 500kHz */
#define JIKAN 200 /* 200 */
ioport();
funrc0();
funrc1();
funrc2();
funrc3();
funrc4();
funrc5();
rledfun();
lledfun();
int flug1=0;
int flug2=0;
main()
{
ioport();
//撪晹敪怳傪CONFIG偱巊偆傛偆偵愝掕偟偰偄傞(INTIO傪婰弎)
//廃攇悢偼壓婰OSCCON偱500Khz偵愝掕
OSCCON=0X30; /* 500kHz */
while(1){
if(RA5==0){
flug1=1;
flug2=0;
}
if(RA5==1 && flug1==1) rledfun();
if(RA4==0){
flug1=0;
flug2=1;
}
if(RA4==1 && flug2==1) lledfun();
if(RA3==0){
flug1=0;
flug2=0;
}
}//while
}//main
rledfun()
{
funrc0();
funrc1();
funrc2();
funrc3();
funrc4();
funrc5();
}
lledfun()
{
funrc5();
funrc4();
funrc3();
funrc2();
funrc1();
funrc0();
}
ioport()
{
ANSEL=0x0; /* AN4-7偼僨僕僞儖I/O儌乕僪 */
CMCON0=0x07;
TRISA=0xFF; /* RA0,1,2,3,4,5偼擖椡僺儞*/
TRISC=0x00; /* RC0-5偼弌椡僺儞 */
PORTA=0xFF; /* RA0,1,2,3,4,5偼H*/
PORTC=0x00; /* RC0-5偼L */
}
funrc0()
{
RC5=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC5=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
funrc1()
{
RC4=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC4=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
funrc2()
{
RC3=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC3=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
funrc3()
{
RC2=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC2=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
funrc4()
{
RC1=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC1=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
funrc5()
{
RC0=1; /* RC0僺儞傪H偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
RC0=0; /* RC0僺儞傪L偵偡傞 */
__delay_ms(JIKAN); /* JIKAN儈儕昩懸偮 */
}
-------------------丂僾儘僌儔儉僜乕僗 END-------------------