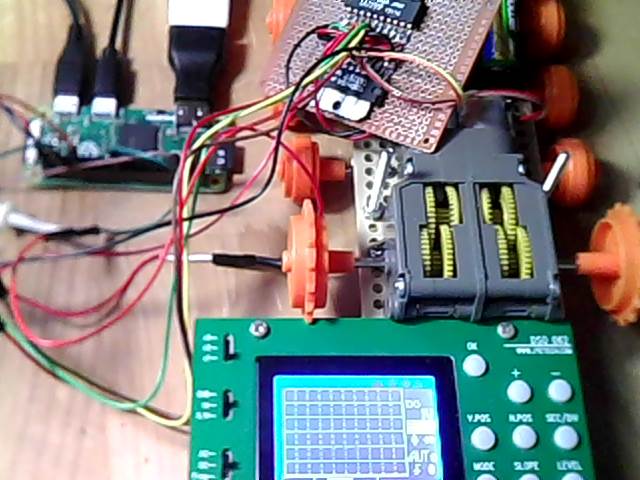
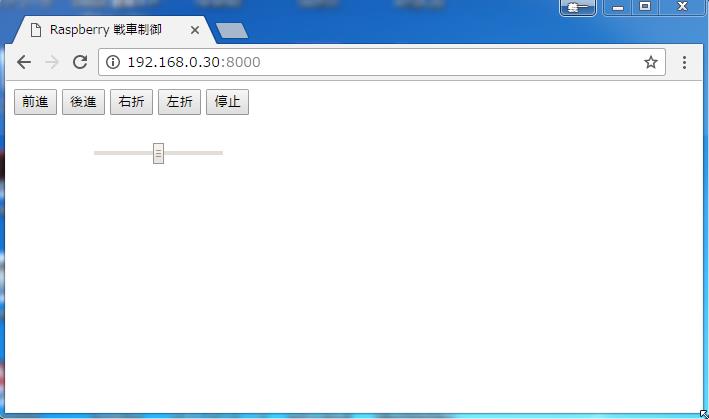
パルス巾が大きいと回転数が多く、パルス巾が小さいとと回転数が少なくなることが 分かったと思います。この操作は下の画像にある別PCからの操作でスライダーで回転数を可変しています。
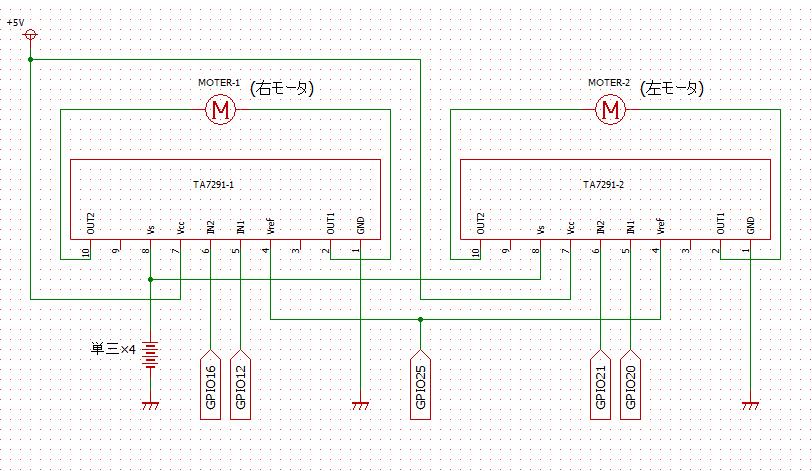
 回路図
回路図
 htmlとスクリプトのプログラムです。( <は半角にして下さい)
<Raspberry Pi-36>で紹介したプログラムに比べて、すっきりしています。
またファイルも少なくなっています。基本的にindex.htmlとscript.pyの2つです。
接続は、http://192.168.30:8000/です、(IPアドレスは自分の環境に合わせて下さい)
index.html
------------------------------------------------------------------------------------------------------
<!DOCTYPE html>
<html lang="ja">
<head>
<meta charset=UTF-8">
<title>Raspberry 戦車制御</title>
<script type="text/javascript" src="/webiopi.js"></script>
<script>
webiopi().ready( function(){
control( 0 ); //制御初期 停止ボタン
Speedlevel( 5 ); //speed初期値(pwmのデューティ比))
} );
function control(mode){
webiopi().callMacro( "Controlmode", mode ); // control 0:停止 1:前進 2:後進 3:右折 4:左折
}
function Speedlevel(level){
webiopi().callMacro( "Speedlevel", level); // Speed制御
}
</script>
</head>
<body>
<form>
<input type="button" value="前進" onclick="control(1)" >
<input type="button" value="後進" onclick="control(2)" >
<input type="button" value="右折" onclick="control(3)" >
<input type="button" value="左折" onclick="control(4)" >
<input type="button" value="停止" onclick="control(0)" >
</form>
<pre>
<input id="slider" type="range" min="0" max="10" step="1" value=5 onchange="showValue()" >
</pre>
<span id="showRangeArea" ></span>
<script type="text/javascript">
function showValue () {
var dc = (document.getElementById("slider").value) ; //スライダの値を変数dcに代入
Speedlevel(dc) //function Speedlevel関数を呼出してそこからマクロ関数呼出してdcを代入
//document.write(dc) //dc値を画面に表示(確認用)
}
</script>
</body>
</html>
------------------------------------------------------------------------------------------------------
script.py
------------------------------------------------------------------------------------------------------
import webiopi
GPIO = webiopi.GPIO
R_IN1 = 12
R_IN2 = 16
L_IN1 = 20
L_IN2 = 21
SPEED_PWM = 25
GPIO.setFunction( R_IN1 ,GPIO.OUT )
GPIO.setFunction( R_IN2, GPIO.OUT )
GPIO.setFunction( L_IN1, GPIO.OUT )
GPIO.setFunction( L_IN2, GPIO.OUT )
GPIO.setFunction( SPEED_PWM, GPIO.PWM )
def pinclear():
GPIO.pwmWrite(R_IN1, 0 )
GPIO.pwmWrite(R_IN2, 0 )
GPIO.pwmWrite(L_IN1, 0 )
GPIO.pwmWrite(L_IN2, 0 )
#onclick="drive(1)で呼び出される
#<form><input type="button" value="Forward" onclick="drive(1)" data-role="none"></form>
@webiopi.macro
def Controlmode( mode ):
if mode == "0":
pinclear()
elif mode == "1":
pinclear()
GPIO.digitalWrite(R_IN1, GPIO.HIGH )
GPIO.digitalWrite(L_IN1, GPIO.HIGH )
elif mode == "2":
pinclear()
GPIO.digitalWrite(R_IN2, GPIO.HIGH )
GPIO.digitalWrite(L_IN2, GPIO.HIGH )
elif mode == "3":
pinclear()
GPIO.digitalWrite(R_IN1, GPIO.HIGH )
GPIO.digitalWrite(L_IN2, GPIO.HIGH )
elif mode == "4":
pinclear()
GPIO.digitalWrite(L_IN1, GPIO.HIGH )
GPIO.digitalWrite(R_IN2, GPIO.HIGH )
@webiopi.macro
def Speedlevel( level ):
GPIO.pwmWrite( SPEED_PWM, int(level)/10 )
------------------------------------------------------------------------------------------------------
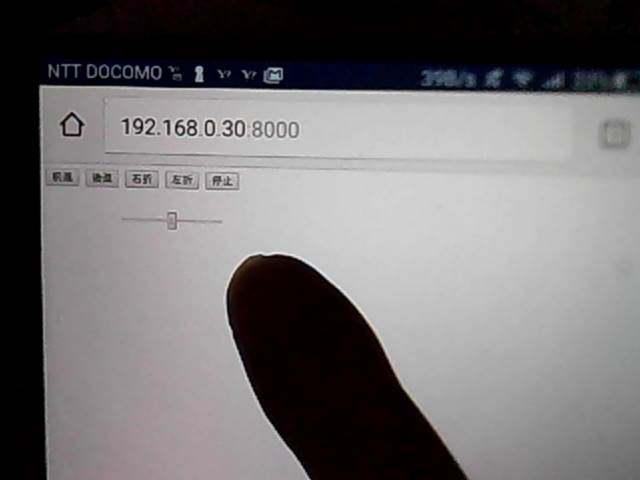
実は、タブレット(7インチ)で操作をやりたい目標があるのですが、下の画像のようにタブレットに
表示されている、ボタンとスライダーが小さく操作が困難です。決して、指が大きいのではありません(~o~)
次は、ボタン、スライダーをタブレット用に改善したいと思っています。
htmlとスクリプトのプログラムです。( <は半角にして下さい)
<Raspberry Pi-36>で紹介したプログラムに比べて、すっきりしています。
またファイルも少なくなっています。基本的にindex.htmlとscript.pyの2つです。
接続は、http://192.168.30:8000/です、(IPアドレスは自分の環境に合わせて下さい)
index.html
------------------------------------------------------------------------------------------------------
<!DOCTYPE html>
<html lang="ja">
<head>
<meta charset=UTF-8">
<title>Raspberry 戦車制御</title>
<script type="text/javascript" src="/webiopi.js"></script>
<script>
webiopi().ready( function(){
control( 0 ); //制御初期 停止ボタン
Speedlevel( 5 ); //speed初期値(pwmのデューティ比))
} );
function control(mode){
webiopi().callMacro( "Controlmode", mode ); // control 0:停止 1:前進 2:後進 3:右折 4:左折
}
function Speedlevel(level){
webiopi().callMacro( "Speedlevel", level); // Speed制御
}
</script>
</head>
<body>
<form>
<input type="button" value="前進" onclick="control(1)" >
<input type="button" value="後進" onclick="control(2)" >
<input type="button" value="右折" onclick="control(3)" >
<input type="button" value="左折" onclick="control(4)" >
<input type="button" value="停止" onclick="control(0)" >
</form>
<pre>
<input id="slider" type="range" min="0" max="10" step="1" value=5 onchange="showValue()" >
</pre>
<span id="showRangeArea" ></span>
<script type="text/javascript">
function showValue () {
var dc = (document.getElementById("slider").value) ; //スライダの値を変数dcに代入
Speedlevel(dc) //function Speedlevel関数を呼出してそこからマクロ関数呼出してdcを代入
//document.write(dc) //dc値を画面に表示(確認用)
}
</script>
</body>
</html>
------------------------------------------------------------------------------------------------------
script.py
------------------------------------------------------------------------------------------------------
import webiopi
GPIO = webiopi.GPIO
R_IN1 = 12
R_IN2 = 16
L_IN1 = 20
L_IN2 = 21
SPEED_PWM = 25
GPIO.setFunction( R_IN1 ,GPIO.OUT )
GPIO.setFunction( R_IN2, GPIO.OUT )
GPIO.setFunction( L_IN1, GPIO.OUT )
GPIO.setFunction( L_IN2, GPIO.OUT )
GPIO.setFunction( SPEED_PWM, GPIO.PWM )
def pinclear():
GPIO.pwmWrite(R_IN1, 0 )
GPIO.pwmWrite(R_IN2, 0 )
GPIO.pwmWrite(L_IN1, 0 )
GPIO.pwmWrite(L_IN2, 0 )
#onclick="drive(1)で呼び出される
#<form><input type="button" value="Forward" onclick="drive(1)" data-role="none"></form>
@webiopi.macro
def Controlmode( mode ):
if mode == "0":
pinclear()
elif mode == "1":
pinclear()
GPIO.digitalWrite(R_IN1, GPIO.HIGH )
GPIO.digitalWrite(L_IN1, GPIO.HIGH )
elif mode == "2":
pinclear()
GPIO.digitalWrite(R_IN2, GPIO.HIGH )
GPIO.digitalWrite(L_IN2, GPIO.HIGH )
elif mode == "3":
pinclear()
GPIO.digitalWrite(R_IN1, GPIO.HIGH )
GPIO.digitalWrite(L_IN2, GPIO.HIGH )
elif mode == "4":
pinclear()
GPIO.digitalWrite(L_IN1, GPIO.HIGH )
GPIO.digitalWrite(R_IN2, GPIO.HIGH )
@webiopi.macro
def Speedlevel( level ):
GPIO.pwmWrite( SPEED_PWM, int(level)/10 )
------------------------------------------------------------------------------------------------------
実は、タブレット(7インチ)で操作をやりたい目標があるのですが、下の画像のようにタブレットに
表示されている、ボタンとスライダーが小さく操作が困難です。決して、指が大きいのではありません(~o~)
次は、ボタン、スライダーをタブレット用に改善したいと思っています。
 Raspberry Pi-40に続く・・・
Raspberry メニューに戻る
Raspberry Pi-40に続く・・・
Raspberry メニューに戻る