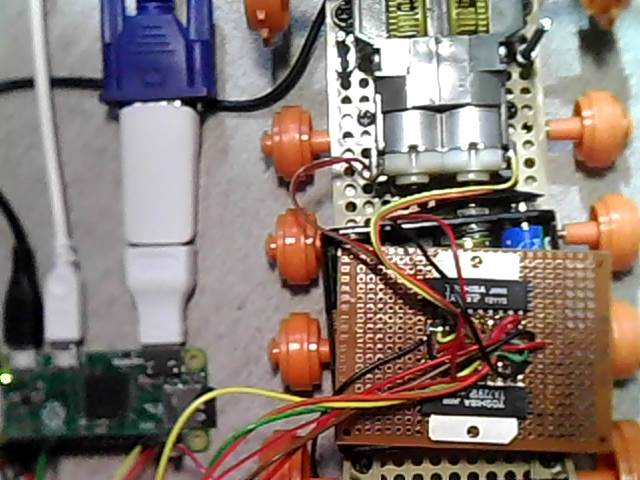
 画像をクリックして見てください
前進、後進、右折、左折の動作をします、オシロに表示するパルスはPWMです
(50Hz,デューティ比50%)
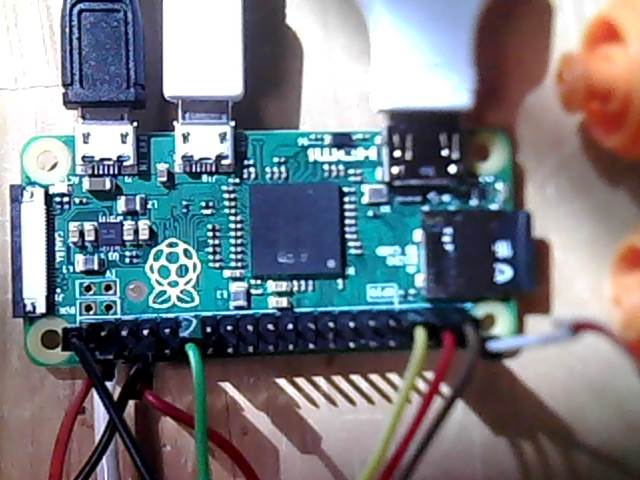
画像をクリックして見てください
前進、後進、右折、左折の動作をします、オシロに表示するパルスはPWMです
(50Hz,デューティ比50%)
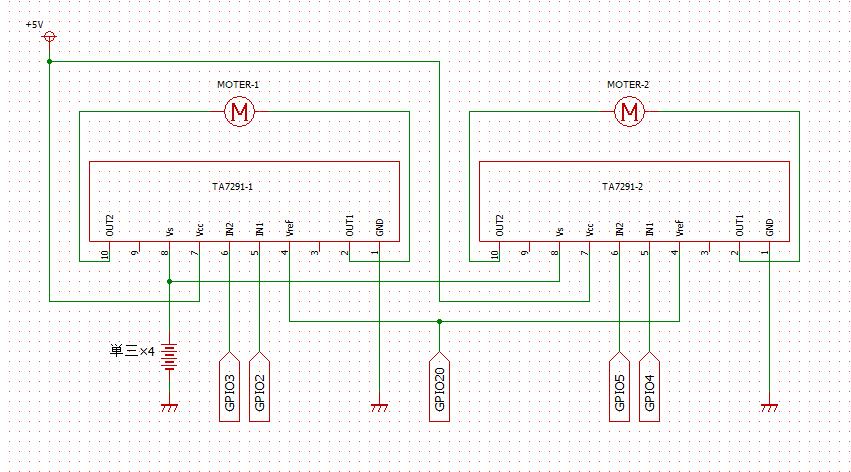
回路図
 Pythonプログラムの準備としてターミナルから下記を実地しておく
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python-pip(続行しますか[y/n]?はyを入力)
Pythonプログラムは下記の通りです(while cnt < 3: <は半角にして下さい)
------------------------------------------------------------------------------------------
#!/usr/bin/python
import RPi.GPIO as GPIO
from time import sleep
gpwm = 20
f = 50
R_IN1 = 2
R_IN2 = 3
L_IN1 = 4
L_IN2 = 5
wait= 3
GPIO.setmode(GPIO.BCM) #GPIO設定をGPIO番号にする(ピン番号の場合はGPIO.BOARDとする)
GPIO.setup(gpwm, GPIO.OUT, initial=GPIO.LOW) #GPIO20を出力にしてLOWにする
GPIO.setup(R_IN1, GPIO.OUT, initial=GPIO.LOW) #GPIO2を出力にしてLOWにする
GPIO.setup(R_IN2, GPIO.OUT, initial=GPIO.LOW) #GPIO3を出力にしてLOWにする
GPIO.setup(L_IN1, GPIO.OUT, initial=GPIO.LOW) #GPIO4を出力にしてLOWにする
GPIO.setup(L_IN2, GPIO.OUT, initial=GPIO.LOW) #GPIO5を出力にしてLOWにする
def mae():
GPIO.output(R_IN1, GPIO.HIGH)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.HIGH)
GPIO.output(L_IN2, GPIO.LOW)
return
def usiro():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.HIGH)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.HIGH)
return
def right():
GPIO.output(R_IN1, GPIO.HIGH)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.HIGH)
return
def left():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.HIGH)
GPIO.output(L_IN1, GPIO.HIGH)
GPIO.output(L_IN2, GPIO.LOW)
return
def stop():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.LOW)
return
gp=GPIO.PWM(gpwm,f)
gp.start(0)
dc = 50
cnt=0
while cnt < 3:
cnt=cnt + 1
gp.ChangeDutyCycle(dc)
mae()
sleep(wait)
usiro()
sleep(wait)
right()
sleep(wait)
left()
sleep(wait)
stop()
gp.ChangeDutyCycle(0)
------------------------------------------------------------------------------------------
Raspberry Pi-39に続く・・・
Raspberry メニューに戻る
Pythonプログラムの準備としてターミナルから下記を実地しておく
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python-pip(続行しますか[y/n]?はyを入力)
Pythonプログラムは下記の通りです(while cnt < 3: <は半角にして下さい)
------------------------------------------------------------------------------------------
#!/usr/bin/python
import RPi.GPIO as GPIO
from time import sleep
gpwm = 20
f = 50
R_IN1 = 2
R_IN2 = 3
L_IN1 = 4
L_IN2 = 5
wait= 3
GPIO.setmode(GPIO.BCM) #GPIO設定をGPIO番号にする(ピン番号の場合はGPIO.BOARDとする)
GPIO.setup(gpwm, GPIO.OUT, initial=GPIO.LOW) #GPIO20を出力にしてLOWにする
GPIO.setup(R_IN1, GPIO.OUT, initial=GPIO.LOW) #GPIO2を出力にしてLOWにする
GPIO.setup(R_IN2, GPIO.OUT, initial=GPIO.LOW) #GPIO3を出力にしてLOWにする
GPIO.setup(L_IN1, GPIO.OUT, initial=GPIO.LOW) #GPIO4を出力にしてLOWにする
GPIO.setup(L_IN2, GPIO.OUT, initial=GPIO.LOW) #GPIO5を出力にしてLOWにする
def mae():
GPIO.output(R_IN1, GPIO.HIGH)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.HIGH)
GPIO.output(L_IN2, GPIO.LOW)
return
def usiro():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.HIGH)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.HIGH)
return
def right():
GPIO.output(R_IN1, GPIO.HIGH)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.HIGH)
return
def left():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.HIGH)
GPIO.output(L_IN1, GPIO.HIGH)
GPIO.output(L_IN2, GPIO.LOW)
return
def stop():
GPIO.output(R_IN1, GPIO.LOW)
GPIO.output(R_IN2, GPIO.LOW)
GPIO.output(L_IN1, GPIO.LOW)
GPIO.output(L_IN2, GPIO.LOW)
return
gp=GPIO.PWM(gpwm,f)
gp.start(0)
dc = 50
cnt=0
while cnt < 3:
cnt=cnt + 1
gp.ChangeDutyCycle(dc)
mae()
sleep(wait)
usiro()
sleep(wait)
right()
sleep(wait)
left()
sleep(wait)
stop()
gp.ChangeDutyCycle(0)
------------------------------------------------------------------------------------------
Raspberry Pi-39に続く・・・
Raspberry メニューに戻る